
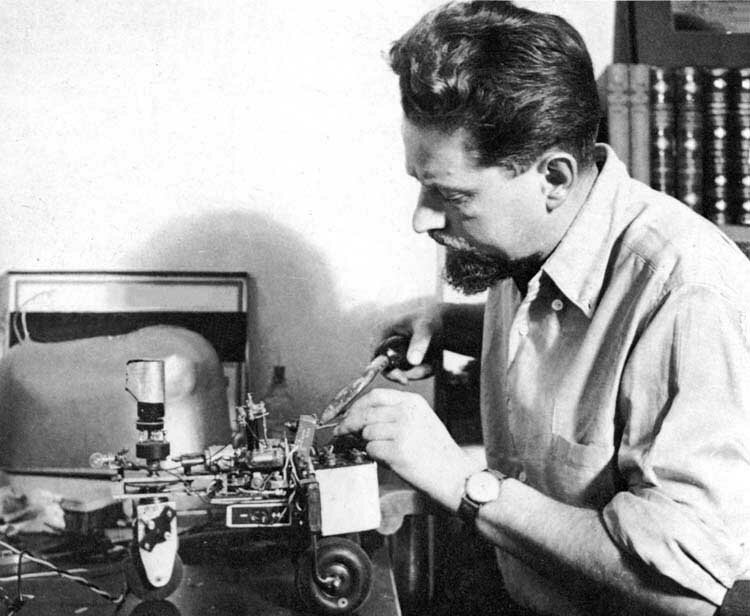
Английский кибернетик, нейрофизиолог и психиатр Грей Уолтер родился в 1910 году. Своих роботов-черепах или, как их называл создатель, machina speculatrix, он начал создавать в 1948 году и продолжал эксперименты с ними до 1951 года. Представляли они собой механические тележки, которые могли двигаться на свет или от него, а также добираться до источников подзарядки аккумуляторных батарей, обходя различные препятствия. Черепахами их прозвали благодаря медлительности и внешнему виду. В отличие от большинства роботов тех лет, двигающихся согласно заранее заданной схеме, «черепахи» Грея Уолтера могли реагировать на изменения внешней среды.
Отец кибернетики Норберт Винер описал роботов Грея Уолтера следующим образом:
«Уловив приблизительно в то же время, что и я, аналогию между обратной связью в машине и нервной системой человека, Уолтер начал конструировать механизмы, которые повторяли бы некоторые особенности поведения животных. Я работал над созданием «мотылька», который автоматически полз бы на свет. Уолтер назвал свои автоматы «черепахами», включив в их репертуар более сложные номера. «Черепахи» были снабжены устройством, помогавшим им не сталкиваться друг с другом при движении, и, кроме того, приспособлением, благодаря которому, чувствуя «голод», т.е. истощение аккумуляторных батарей, они направлялись к специальному «месту кормления», где глотали электричество до тех пор, пока аккумуляторные батареи не перезаряжались».
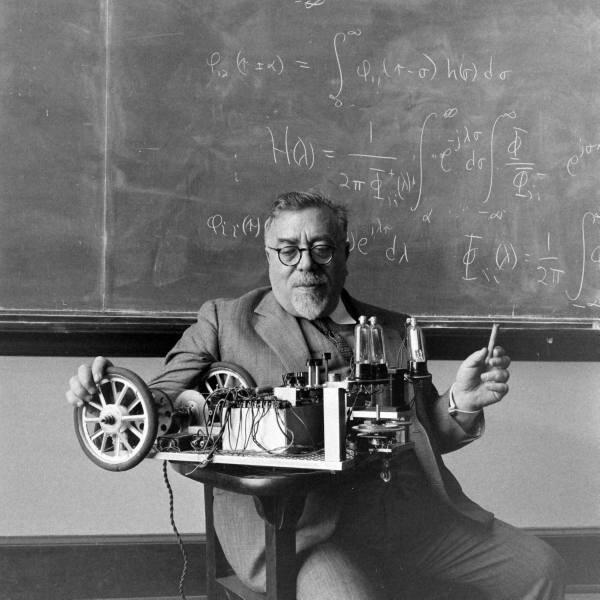
Грей Уолтер создал 8 вариантов роботов-черепах. Так, «черепаха» Элмер выглядела как трёхколесная тележка, оснащенная двумя электромоторами, которые питались от аккумуляторов. Один двигатель обеспечивал поступательное движение тележки, второй – изменял направление её движения. Двигателями можно было управлять при помощи электромагнитных реле. Благодаря фотоэлементу, который располагался на рулевой колонке тележки, робот мог распознавать препятствия.
По сути, робот-черепаха мог действовать в соответствии с тремя схемами: движение к свету, поворот к свету и избегание препятствий. Если аккумулятор был заряжен, а освещение в помещении было слабым, робот медленно передвигался по комнате в поиске источника света, при столкновениях с препятствиями он корректировал направления движения. Соответственно, если в помещении появлялся источник яркого света, тр робот-черепаха двигался в его направлении. При этом, достигнув источника света, он отворачивался от него, как бы «боясь» ослепления, после чего он двигался вокруг данного источника, находя для себя оптимальное положение. Когда его аккумулятор начинал разряжаться, робот все ближе приближался к источнику света, а при низком уровне заряда аккумулятора робот вплотную приближался к данному источнику и подключался к зарядному устройству. После зарядки аккумулятора робот снова отдалялся от источника света.
Более активно на изменения света реагировал другой робот – Элзи. В случае наличия двух источников света в помещении робот двигался то к одной лампе, то к другой. Кроме того, роботы могли узнать друг друга по зажженной лампочке и двигались друг к другу навстречу.

Не только на изменения света, но и на звук умел реагировать робот-черепаха Кора. «Слышала» Кора благодаря микрофону. Кроме того, наличие конденсатора, сохранявшего некоторое время электрический заряд, обеспечивало наличие у данного робота чего-то вроде условного рефлекса. Таким образом, Кору можно было обучать.
Англичане называет условный рефлекс learned reflex – выученный рефлекс. Рефлекс вырабатывается в случае повторения одного и того же действия, без этого условный рефлекс пропадает. В случае робота-черепахи Коры раздражителем, вызывающим условный рефлекс, был звук свистка. Когда Кора натыкалась на то или иное препятствие, звучал свисток. Вначале робот-черепаха не реагировала на звук свистка, затем, услышав свисток, она меняла направление движения, даже если препятствия перед ней не было. Если же Уолтер слишком часто подавал Коре звуковые сигналы при отсутствии преград, то у неё пропадал данный условный рефлекс.
Экспериментируя с Корой, Уолтер всегда пытался усложнить её поведение. Так как английские полицейские свистки были двухтональными, ученый использовал данное обстоятельство. Ученый использовал второй тон свистка для создания второго слухового контура своего робота, связав его с появлением в помещении нового источника света. Первый вид свистка звучал, когда черепаха достигала очередного препятствия, а второй – перед тем, как загорался свет.
В связи с этим Уолтер задался вопросом о том, как робот-черепаха Кора отреагировать на два тона свистка, прозвучавших одновременно. В свою очередь, робот-черепаха отреагировал на эту ситуацию подобно живому существу. Обработав полученную информацию, Кора забилась в темный угол для того, чтобы восстановить силы после сенсорной перегрузки. Через некоторое время она вернулась к нормальному функционированию и снова начинала искать источник света.
Таким образом, роботы, созданные Греем Уолтера, проявляли элементы развития, присущие живым существам, корректируя модели поведения в зависимости от внешних обстоятельств. Эксперименты с внешней средой и «нервной системой» роботов-черепах привели к интересным результатам: поведение роботов никогда не повторялись, однако их действия всегда укладывалось в рамки определенного поведенческого образца, как это происходит у живых существ.
Изобретения Грея Уолтера заинтересовали мировое научное сообщество и вдохновили других ученых на создание роботов подобного рода. Например, американец Эдмунд Беркли изобрел белку, собирающую орехи и относящую их в гнездо, мышь, созданная Клодом Шенноном, умела находить дорогу в лабиринте, электронный лисицы Барабара и Джоб, сконструированные французским физиком Альбером Дюкроком, реагировали на прикосновение, свет и звук, а одновременное возникновение света и звука вызывало появление условного рефлекса. В Советском Союзе также был создан робот, реагирующий на внешние раздражители: такого робота-черепаху построили сотрудники института автоматики и телемеханики АН СССР А.П. Петровский и Р.Р. Васильев.
Также на развитие рефлексов у роботов повлияли работы итальянского невролога и кибернетика Валентино Брайтенбурга, посвященные синтезированию биологического поведения простейшими схемами. Так, классическлй стала его книга «Машины: эксперименты с синтетической психологией», написанная в 1984 году.
В 2006 году американский ученый Ламброс Малафурис написал статью «The Cognitive Basis of Material Engagement: Where Brain, Body, and Culture Conflate», в которой утверждалось, что секрет успешного функционирования роботов заключается в связи мозг-тело-окружающая-среда. Именно благодаря этой связи роботы-черепахи Грея Уолтера демонстрировали поведение, присущее живым организмам.
Эксперименты с искусственным интеллектом происходят и по сей день. Роботы стали гораздо более качественно справляться с поставленными задачами, однако во многом современные ученые обязаны своими успехами Грею Уолтеру.